最高3倍无损提速,用数学规划求解器寻找最优解更快了!
近日,中科大王杰教授团队(MIRA Lab)和华为诺亚方舟实验室(Huawei Noah’s Ark Lab)联合提出了分层序列/集合模型,并开发了基于该分层模型的智能决策训练方法。
显著提升混合整数线性规划(MILP)求解器求解效率,取得最高3倍无损提速。
数学规划求解器因其重要性和通用性,被誉为运筹优化领域的“光刻机”。
其中,MILP求解器是数学规划求解器的关键组件,可建模大量实际应用。
打个比方,MILP求解器就像一个智能助手,能通过数学方法和算法帮助寻找最优解。
在更复杂的情况下,比如物流调度、生产计划、金融投资等领域,MILP求解器可以帮助决策者在复杂约束条件下做出最优选择。
目前论文发表在人工智能顶级期刊IEEE TPAMI 2024。
背景与问题介绍
割平面(cutting planes, cuts)在加速求解混合整数线性规划(MILP)问题中发挥着至关重要的作用。自上世纪50年代以来,割平面法作为求解MILP问题的强大工具,已成为学术界和工业界广泛研究的重点。经过多年的实践验证,割平面法已被公认为快速求解MILP问题的关键技术。
其中割平面选择(cut selection)目标是:
选择待选割平面的恰当子集以无损提高求解MILP的效率。
据介绍,割平面选择在很大程度上取决于两个子问题:
(P1) 应优先选哪些割平面
(P2) 应选择多少割平面
研究人员认为,尽管许多现代MILP求解器通过手动设计的启发式方法来处理 (P1) 和 (P2),但机器学习方法有潜力学习更有效的启发式方法。
然而,许多现有的学习类方法侧重于学习应该优先选择哪些割平面,而忽略了学习应该选择多少割平面。
此外,研究人员从大量的实验结果中发现又一子问题对求解MILP的效率有重大影响。
(P3) 应该优先选择哪种割平面顺序
针对上述挑战,研究人员提出了一种新的分层序列/集合模型(Hierarchical Sequence/Set Model,HEM++),并构建了基于该模型的强化学习框架来学习割平面选择策略。
下面具体展开。
割平面介绍
混合整数线性规划(MILP)是一种可广泛应用于多种实际应用领域的通用优化模型,例如供应链管理、排产规划、规划调度、工厂选址、装箱问题等。
标准的MILP具有以下形式:

给定上述问题,丢弃其所有整数约束,可得到线性规划松弛(linear programming relaxation,LPR)问题,它的形式为:

由于松弛问题扩展了原始问题的可行域,因此可有 ,即LPR问题的最优值是原MILP问题的下界。
,即LPR问题的最优值是原MILP问题的下界。
给定松弛问题,割平面是一类合法线性不等式,这些不等式在添加到线性规划松弛问题中后,可收缩LPR问题中的可行域空间,且不去除任何原MILP问题中任何整数可行解。
割平面选择介绍
MILP求解器在求解MILP问题过程中可生成大量的割平面,且生成的割平面会在连续的回合中不断向原问题中添加割平面。
具体而言,每一回合中包括五个步骤:
(1) 求解当前的LPR问题;
(2) 生成一系列待选割平面;
(3) 从待选割平面中选择一个合适的子集;
(4) 将选择的子集添加到(1)中的LPR问题,以得到一个新的LPR问题;
(5) 循环重复,基于新的LPR问题,进入下一个回合。
将所有生成的割平面添加到LPR问题中可最大程度地收缩该问题的可行域空间,以最大程度提高下界。
然而,添加过多的割平面可能会导致问题约束过多,增加问题求解计算开销并出现数值不稳定问题。
因此,研究者们提出了割平面选择,它的目标是选择候选割平面的适当子集,以尽可能提升MILP问题求解效率。
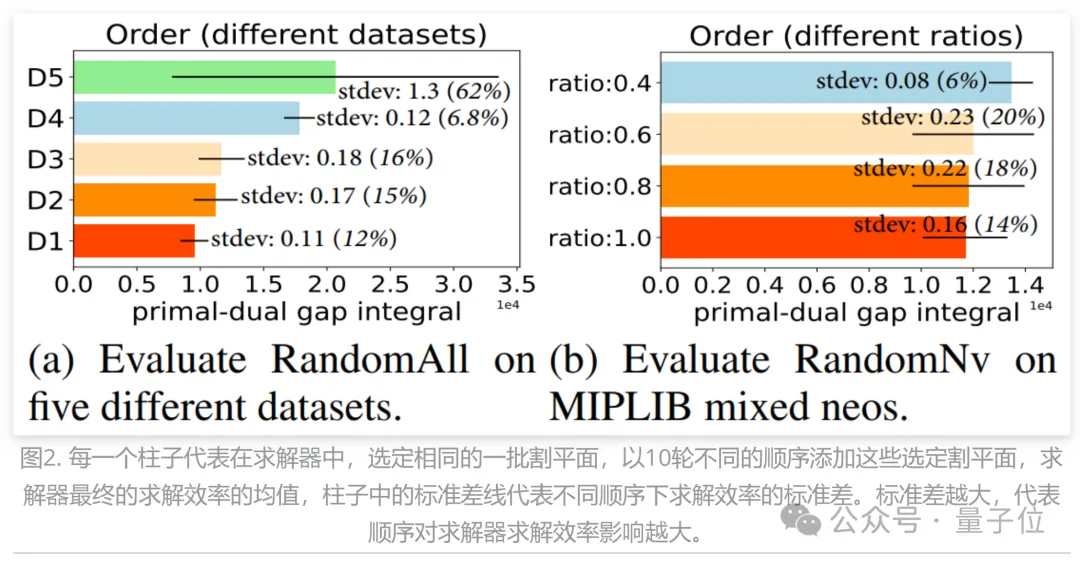
启发实验:割平面添加顺序
研究人员设计了两种割平面选择启发式算法,分别为RandomAll和RandomNV(详见原论文第3章节)。
它们都在选择了一批割平面后,以随机顺序将选择的割平面添加到MILP问题中。
结果显示,选定同一批割平面的情况下,以不同的顺序添加这些选定割平面对求解器求解效率有极大的影响(详细结果分析见原论文第3章节)。
方法介绍
据介绍,在割平面选择任务中,应该选择的最优子集是不可事先获取的。
不过,研究人员可以使用求解器评估所选任意子集的质量,并以此评估作为学习算法的反馈。
因此,团队利用强化学习(Reinforcement Learning, RL)范式来试错学习割平面选择策略。
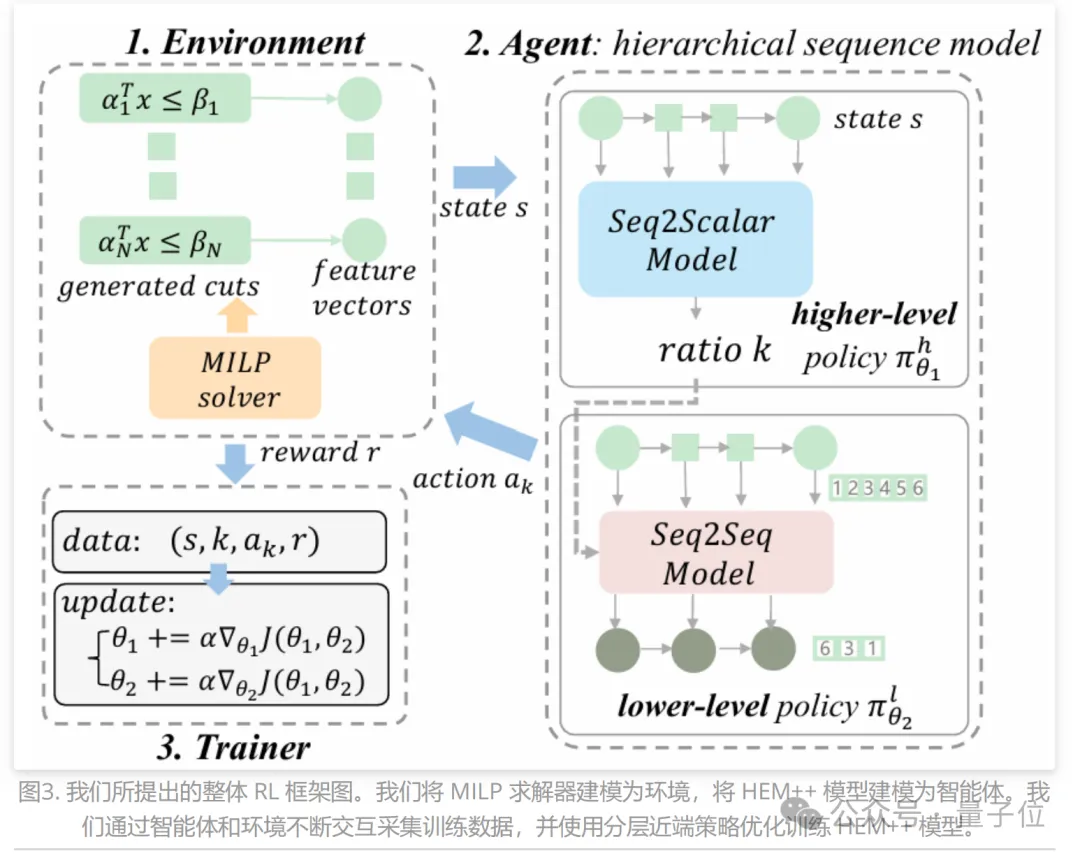
研究人员详细阐述了提出的RL框架。(整体的RL框架图如图2所示)
首先,他们将割平面选择任务建模为马尔科夫决策过程(Markov Decision Process, MDP)。
然后,详细介绍了提出的分层序列/集合模型HEM++。
最后,推导可高效训练HEM++ 的分层近端策略优化(hierarchical proximal policy optimization, HPPO)方法。
下面一一展开。
问题建模:序列决策建模
状态空间:由于当前的LP松弛和生成的待选cuts包含割平面选择的核心信息,研究人员通过(𝑀𝐿𝑃,𝐶, )定义状态s。
)定义状态s。
这里𝑀𝐿𝑃表示当前LP松弛的数学模型,𝐶表示候选割平面的集合, 表示LP松弛的最优解。
表示LP松弛的最优解。
为了编码状态信息,研究人员根据(𝑀𝐿𝑃,𝐶, )的信息为每个待选割平面设计13个特征。
)的信息为每个待选割平面设计13个特征。
也就是说,通过一个13维特征向量来表示状态s。(具体细节请见原文第5和第6章节)
动作空间:为了同时考虑所选cut的比例和顺序,研究人员以候选割平面集合的所有有序子集构成的集合𝐴和选择cut的比例空间[0,1]的直积,即动作空间𝐴HEM++=𝐴 x [0,1]。
奖励函数:为了评估添加cut对求解MILP的影响,可通过求解时间,原始对偶间隙积分(primaldual gap integral),对偶界提升(dual bound improvement)。
转移函数:转移函数给定当前状态s和采取的动作𝑎,输出下一状态s’。割平面选择任务中转移函数隐式地由求解器提供。
更多建模细节请见原文第5和第6章节。
策略模型:分层序列/集合模型
如图所示,研究人员将MILP求解器建模为环境,将HEM++建模为智能体,下面详细介绍所提出的HEM++模型。
可以看出,HEM++由上下层策略模型组成。上下层模型分别学习上层策略(policy)πℎ和下层(policy)π𝑙。
首先,上层策略通过预测恰当的比例来学习应该选择的cuts的数量。
假设状态长度为N,预测比率为k,那么预测应该选择的cut数为 ,其中
,其中 表示向下取整函数。
表示向下取整函数。
研究人员定义 。
。
其次,下层策略学习选择给定大小的有序子集。
下层策略可以定义 S x [0,1] → P(𝐴),其中 表示给定状态s和比例k的动作空间上的概率分布。
表示给定状态s和比例k的动作空间上的概率分布。
具体来说,研究人员将下层策略建模为一个序列到序列或者集合到序列模型(sequence/set to sequence model, sequence/set model)。
最后,通过概率乘法定理可得分层cut选择策略,即: 。
。
训练方法:分层近端策略优化方法
研究人员用[0,1] x 𝐴 表示动作空间,用 表示分层割平面策略。
表示分层割平面策略。
最终推导出HPPO,当前策略和旧策略的概率比表示如下:

为了避免过大的策略更新,研究人员对此概率比进行裁剪得到rclip。
进一步地,给定优势函数的估计器,优化目标为:
最后,分层策略梯度如下:
具体细节请见原文第6章节。
实验介绍
实验共有五个主要部分。
实验1. 在3个人工生成的MILP问题和来自不同应用领域的6个具有挑战性的MILP问题基准上评估新方法;
实验2. 进行消融实验,以提供对HEM++的深入洞察;
实验3. 测试HEM++针对问题规模的泛化性能;
实验4. 可视化新方法与基线所选择的割平面特点;
实验5. 将新方法部署到华为实际的排产规划问题中,验证HEM++的优越性;
下面仅简单介绍下实验1,更多实验结果,可参见原论文第8章节。
研究人员提醒道,论文中汇报的所有实验结果都是基于PyTorch版本代码训练得到的结果。
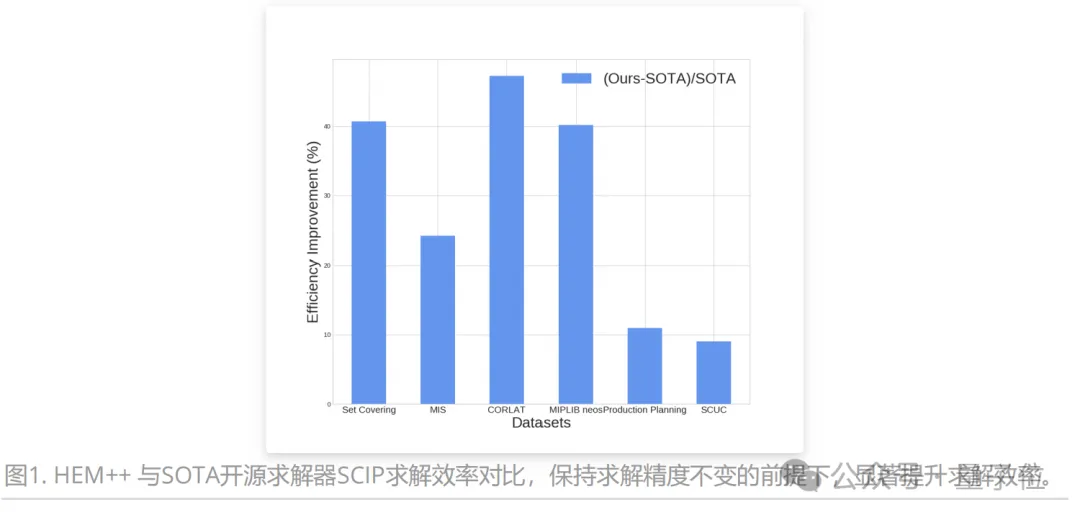
如图所示,在多个开源数据集和工业数据集上对比了HEM++和最先进开源求解器SCIP基线。
实验结果显示,HEM++可在保持求解精度不变的情况下,大幅提升求解效率。
据团队介绍,相关技术和能力整合入华为天筹(OptVerse)AI求解器,助力提升天筹AI求解器竞争力,成为其首批关键AI特性。
天筹AI求解器将运筹学和AI相结合,针对线性和整数模型寻找最优解,以通用形式描述问题,高效计算最优方案,助力企业量化决策和精细化运营。
天筹AI求解器曾获世界人工智能大会最高奖“卓越人工智能引领者” SAIL奖,并在国际权威数学优化求解器榜单中的5项重量级榜单登上榜首。
相关算法整合入华为MindSpore ModelZoo模型库,助力国产开源生态。
华为MindSpore是一个全场景深度学习框架,目标是实现易开发、高效执行、全场景覆盖三大目标。
更多细节欢迎查阅原论文。
本论文作者王治海是中国科学技术大学2020级硕博连读生,师从王杰教授,主要研究方向为强化学习与学习优化理论及方法,人工智能驱动的芯片设计等。他曾以第一作者在TPAMI、ICML、ICLR、AAAI等顶级期刊与会议上发表论文六篇,一篇入选ICML亮点论文(前3.5%),曾获华为优秀实习生(5/400+)、国家奖学金等荣誉。
华为MindSpore ModelZoo模型库:https://gitee.com/mindspore/models/tree/master/research/l2o/hem-learning-to-cut
论文地址:https://ieeexplore.ieee.org/document/10607926
代码地址:https://github.com/MIRALab-USTC/L2O-HEM-Torch
数据地址:https://drive.google.com/drive/folders/1LXLZ8vq3L7v00XH-Tx3U6hiTJ79sCzxY
会议版本论文(ICLR 2023):https://arxiv.org/abs/2302.00244




还没有评论,来说两句吧...